
消息面上,11月15日举行人工智能应用创新成果发布会。届时,华为(深圳)全球具身智能产业创新中心将举行优选伙伴签约仪式。
据首届中国人形机器人产业大会发布的报告预测,2024年中国人形机器人市场规模将达到27.6亿元,到2030年有望成长为千亿元市场,市场规模达1192.46亿元。
2023年,深圳市人工智能产业规模超3000亿元,同比增长超20%;拥有超过2200家人工智能企业。2024年上半年,深圳机器人相关企业数量达3899家,核心企业607家,上市企业34家。

人形机器人何时实现规模化应用?
在硬件方面,关键零部件的基础性能尚需一定时间去提升,机器人本体结构的优化再加上以大模型引导的智能性的持续提升,才能最终通过3到5年的时间在智能制造、智能仓储等通用场景里实现通用人形机器人的应用。
目前人形机器人商业化的主要难点在于算法的智能性需要持续的提升,因为其要从过拟合的场景应用泛化到更多的通用场景;通过更加自然的无代码的人机交互方式去教机器人,这个能力也在持续提升。

人形机器人硬件进展
随着人形机器人产业的迅猛发展,尤其是在中国各类机器人品牌的涌现和模型机的推出之际,本土零部件标准件的需求变得尤为迫切。在量产前夕,减速器、传感器、电机等零部件的制造商有望获得显著的市场机遇。
斯菱股份表示,在机器人零部件方面,公司目前主要是以谐波减速器和执行器模组这两类产品为主。机器人零部件相关产品目前还在打造一个产线,预计在年底之前能够达到小批量生产的标准。
肇民科技证券部人士称,人形机器人相关的零部件正在开发当中。
恒帅股份方面表示,将重点着力谐波磁场电机技术的场景适配,匹配谐波磁场电机技术与人形机器人所需电机品种定制化需求的结合点,实现为客户提供成熟解决方案及实物交样机会。
天奇股份证券部人士表示,“现在机器人已经进到相关品牌汽车的工厂,(处)在某些工位的实景训练阶段”。
金力永磁透露,正配合人形机器人用磁组件研发,陆续有小批量交付;
双林股份滚柱丝杠产品目前已研发出样品,尚在验证过程中。

人形机器人软件进展
据悉,15日参会的华为(深圳)全球具身智能产业创新中心是致力于瞄准国际前沿技术,服务于国家战略需求,为研发成果及产业化技术搭建创新枢纽。
华为常务董事、华为云CEO张平安介绍创新中心还将在“研”“孵”“用”等多个方面构建产业生态,通过科技攻关,加大技术革命性突破,扩大行业影响力。
【德讯课堂-具身智能】
具身智能又叫具象智能(E-AI),是一个涉及人工智能、机器人学、认知科学等多个领域的综合性概念。具身智能是一种基于物理身体进行感知和行动的智能系统,可在与环境的交互中获取信息、理解任务、做出决策、实现行动。
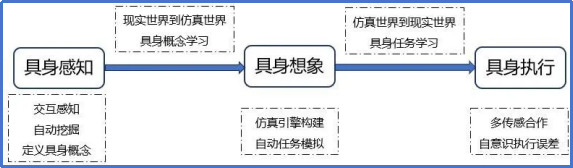
具身智能的实现过程包括感知、想象、执行三个核心环节。
具身感知是具身想象和具身执行的支撑,包括对世界模型的全感知及 与环境的实时交互感知,可结合真实交互不断修正预先构建的数据库,获得更精确的世界理解与模型建立。
1.感知层:具身智能精准感知内外环境的核心媒介。
主要包括力矩传感器、视觉传感器、惯性传感器等。其中,力矩传感器是具身智能感测力和力矩信息的主流选择,包括应用于腕部、踝部等对柔顺控制要求较高部位的六维力矩传感器及应用于其他关节的关节扭矩传感器。
核心机会:视觉传感器是具身智能获取外界图像信息的核心部件,主要包括3D 相机、激光雷达、多目视觉等。
2.想象层:大模型是具身智能进行任务规划与决策的核心。
其学习能力的提升需要强算法的支撑,快速训练和实时推理能力的发展需要以 AI芯片为核心的强大算力的支持。
核心机会:大语言模型(LLM)、多模态大模型(LMM);主要包括图像处理单元(GPU)、现场可编程门阵列(FPGA)、专用集成电路(ASIC)等。
3.执行层:具身智能精密动作的执行。
电机是具身智能的动力来源,目前具身智能关节主要采用无框力电机,灵巧手主要采用空心杯电机。精密减速器是具身智能旋转执行器中最重要的部件,主要包括应用于胯部等旋转大关节处的RV减速器和应用于腕部、手部等旋转小关节处的谐波减速器。滚柱丝杠用于旋转运动与直线运动的转换,包括将旋转运动转化为直线运动的行星滚动丝杠,将直线运动转化为旋转运动的反行星滚柱丝杠。
核心机会:电机、精密减速器、滚柱丝杠、铜缆高速连接。
上面我们提到了人形机器人部分硬件上市公司以及软件“具身智能”的重要性,有想进一步了解的朋友欢迎咨询交流。

未经允许不得转载:财富在线科技 » 15日!华为签约!人工智能大会!“具身智能”34家!











评论前必须登录!
登陆 注册